Context:
In the midst of my COVID quarantine, a design for a motorcycle reverse gear graced my news feed. Michelin had patented a design that could be bolted on to any motorcycle (theoretically) and allow it to move in reverse. Most motorcycles don’t bother with reverse gears, because the added weight and complexity is thought to be unnecessary given the lightness of the vehicle. I’m not a huge fan of 90-point turns, and a reverse gear would allow for riders to reverse out of tight spots quickly, reducing their vulnerability time in crowded parking lots or streets. Given that I like reversible operations, I was a big fan of Michelin’s idea.
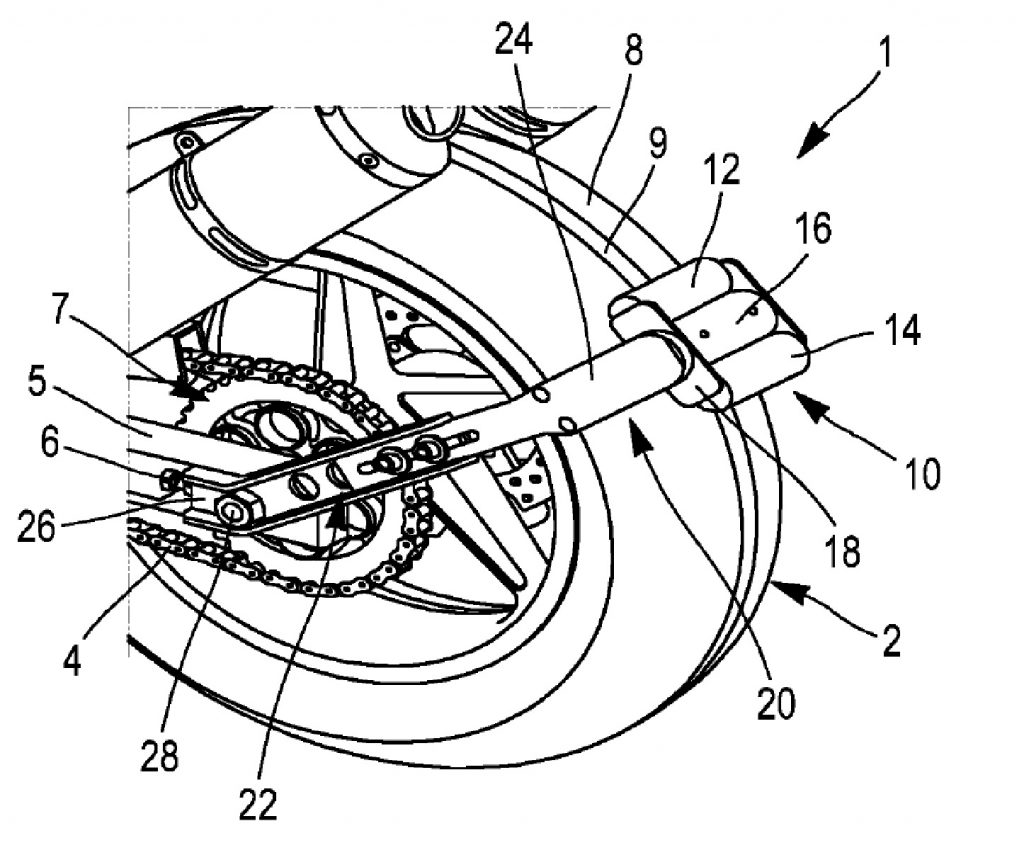
Michelin’s design is comprised of two rollers that are pressed against the rear wheel of the motorcycle. These rollers are driven by two electric motors. I think this is a clever design, I have yet to run into a motorcycle without an accessible rear wheel, so it’s quite generalizable. However, I had two main issues with it:
1) In order to engage the reverse gear, it seems that the rollers have to be manually adjusted/tensioned so that they make contact with the rear tire. To disengage the system, they then have to be loosened and freed from contact. This makes engaging the reverse gear an affair that involves a wrench, which is significantly more time consuming than shifting a lever.
2) It’s just a patent and I can’t buy one.
Build Process:
I was inspired by the patent, and I had ample free time during lockdown to make my own reverse gear. I had two main goals for the project. Develop an electric reverse gear that can be easily engaged and disengaged. Do not develop an electric reverse gear that will jam the drivetrain while riding and throw you from the bike. While this seemed like a straightforward task, I found it quite difficult. Engaging and disengaging power to a drive wheel is usually done through a clutch system. Alternatively, you could connect and disconnect drive sprockets, much like a bicycle derailleur. However, the footprint of a motorcycle is too small for a dedicated reverse gear clutch, and bicycle hardware will not withstand the necessary torque. I also don’t have access to metal machining equipment, so my choices of material were limited.
The solution I settled with was heavily inspired by starter motors. A starter motor works by having a little gear on an extendable shaft. This shaft is attached to an electric motor. When the starter is engaged, the little gear extends out to make contact with the flywheel of the vehicle, and then it turns to start the engine. The flywheel itself is a massive gear, and the subsequent gear reduction gives the electric motor the torque it needs to turn the engine over. Once the engine starts, the gear retracts. There’s some other clever mechanical wizardry at play, but that’s the essence of it.
This kind of design would work well for a reverse gear. It doesn’t require a clutch, and the direct mating of two gears can transmit plenty of torque. The basic premise is to mount controls for the gear on the handlebars and once the reverse gear is engaged, it will extend out and drive the motorcycle backwards. It will then retract when not in use. If we follow the starter motor principle for an electric reverse gear, we need a motor, an extendable gear on the electric motor’s output shaft, and a location on the motorcycle drivetrain for the gear to interface with and transmit the power.
After many rounds of failed prototypes, I landed on this design:
Engaging and Disengaging:
Engaging and Disengaging the electric motor to the drivetrain involves pushing the electric motor’s output gear, (pictured in blue in the animations) to mesh with the sprocket adapter gear (pictured in green in the animations). The sprocket adapter gear is fixed to the wheel and it’s rotation drives the motorcycle backwards. This process requires three components: The sled, the shift lever, and synchro-shaft.
Sled: The sled (pictured in white) pushes the motor output gear to mesh with sprocket adapter gear. The sled is cable actuated via a lever that is mounted to the handlebars. This lever engages and disengages the reverse gear. I decided to use cable actuation over a push/pull solenoid to reduce the footprint and to be able to feel when the gear slotted into place. Additionally, because the sled keeps the electric motor from accidentally engaging and jamming the rear wheel, I wanted a solid mechanical connection. As an added safety, the sled is also held in the disengaged position by two springs, one located in the housing, and another in the shift lever.
Lever: The lever is a simple bolt action mechanism that actuates the sled into the engaged and disengaged positions via metal cables. It is mounted on the handlebars of the motorcycle.
Synchro-shaft: The synchro-shaft (pictured in yellow) addresses the issue of pushing two gears together. When mating two gears together (in my case the electric motor output gear and the sprocket adapter gear), there is the possibility that they will be out of phase, and their teeth clash together. Even if they aren’t entirely out of phase, it is unlikely that they will mesh together perfectly. The synchro-shaft allows for rotational play in the motor output gear and the shaft. This, along with bevels on the teeth of the mating gears, allows the two gears to be meshed together, even when the gears are out of sync.
The Reverse Gear Drivetrain:
The electric motor first turns the gear directly attached to its output shaft. This meshes with first large intermediate gear in a 4:1 reduction. The intermediate gear is attached to the synchro-shaft through a one way clutch bearing. This allows the electric reverse gear to turn the rear wheel, but prevents the rear wheel from back driving the motor. This is a similar type of bearing to the one present in bicycle pedals. The synchro-shaft is then attached to the motor output gear. The motor output gear turns the sprocket adapter gear in a roughly 6:1 reduction, for a total increase in torque of 24x. The sprocket is attached to the rear wheel, which then moves the motorcycle backwards.
This gearbox and drivetrain are entirely 3D printed, and are housed within the reverse gear assembly.
Housing/Mounting:
The mounting was designed by 3D scanning the motorcycle swingarm with my phone and then taking a negative from the mesh. This is the same process I used to create the 3D printed seat. The scan was used as a template to model a clamshell housing that secured onto the bars of the swingarm. The housing design was entirely informed by the mechanical requirements of the gearing and motor size.
Electric Motor and Associated Componentry
I briefly considered buying off the shelf DC motors to drive the reverse gear. However, I would then have to source a gearbox and motor, create a control system for it, add power supply and all the auxiliaries. Instead, I just bought and dismantled a Ryobi 18V Right Angle Drill. This was fairly cost effective, as I needed all of the components. The Ryobi drill actually advertises 29 ft/lbs of torque at 450 rpm. With the added manufacturer honesty tax of -20%, that leaves us with 23.2 ft/lbs of torque. Given my motorcycle makes around 60 ft/lbs of torque from the engine, the drill should be more than ample considering the 24:1 gear reduction. The drill also has a variable speed trigger, control board, a standalone battery, and a right angle transmission. All I had to do was take out the motor and mount it in the reverse gear housing, extend the wiring so that I could mount the variable speed trigger on my handlebars, and then wire up the drill’s battery and controller to my rear seat storage.
Fabrication:
The entire reverse gear, sans the electric componentry and actuating cables, is 3D printed. That includes all of the drive components (gears, shafts, etc.). It took some experimenting with materials, and breaking multiple prototypes to find a good filament and print settings. I settled on 100% infill Prusament PC to print all of the drive components. The mounting/housing was printed with 50% infill and 3mm thick walls of PETG. The polycarbonate is remarkably strong, and I have had no issues with the drivetrain. The mounting will likely need to be reprinted, as when the gear engages, the housing plastic flexes and makes an unpleasant creaking noise.
Safety Concerns:
I think crashing on my motorcycle because I tried to DIY an electric reverse gear is a difficult thing to explain to first responders. Any time you mess with the drivetrain of a motor vehicle, you run the risk of jeopardizing its safety. The most dangerous point of failure in this design is the shifting sled. If the sled somehow engages the reverse gear while the motorcycle is in motion, it would likely briefly lock up the rear wheel. This is almost certain to result in a crash. To avoid this, I implemented three independent redundancies. My first defense is the lever. The lever bolts into the disengaged position, preventing the sled from moving due to vibrations. Should the lever work itself free, there is a spring in the lever housing that holds it into the disengaged position. Should the metal cable that attaches the sled to the lever fail, there is another spring located in the reverse gear housing itself, that is always pushing the motor output gear into the disengaged position. This way, the failure state of the sled should be in the “off” position.
Conclusion:
I’m actually really surprised by how well the reverse gear turned out. It’s been on my bike since early July, and I haven’t had any major issues. I only have two minor complaints. Every once in a while, the reverse gear makes a loud creaking noise during operation. I suspect it’s because the housing is printed in PETG with only 50% infill. I’m just waiting for it to break so that I can replace it. My second complaint is the lack of adjustability. The distance that the motor output gear sits from the sprocket adapter gear is incredibly important. If too close, the gears will not mesh. If too far, the gears will skip. Ideally, the housing would have a tensioner that could adjust the distance the motor output gear sits from the sprocket adapter gear. I ended up having to print several versions of the sprocket adapter gear to get the distance just right.
However, aside from those complaints, the electric reverse system works incredibly well! My main goal was to make a reverse gear that could be easily engaged and disengaged, and I seem to be successful. The shifting is remarkably smooth, considering the ridges of the 3D printed gears. Actually reversing is very controllable, the gear reduction slows the speed to a walk, and the drill itself has a variable controller. The polycarbonate gearbox and drivetrain has yet to break, despite suffering significant abuse during testing. The torque from the drill and gear reduction is more than enough to pull the motorcycle backwards up steep inclines. The systems also looks pretty good, it sits almost flush with the swingarm, and doesn’t look out of place. Overall, I highly recommend this modification to anyone who enjoys making things, and is willing to spend eye-watering amounts of time to fix a minor inconvenience.